Scalable Distributed Controller Synthesis for Multi-Agent Systems Using Barrier Functions and Symbolic Control
Jeel. Chatrola, Sundarsingh. DS, Jay. Bhagiya, Adnane. Saoud, and 2 more authors
62nd Conference on Decision and Control (CDC) , Dec 2023
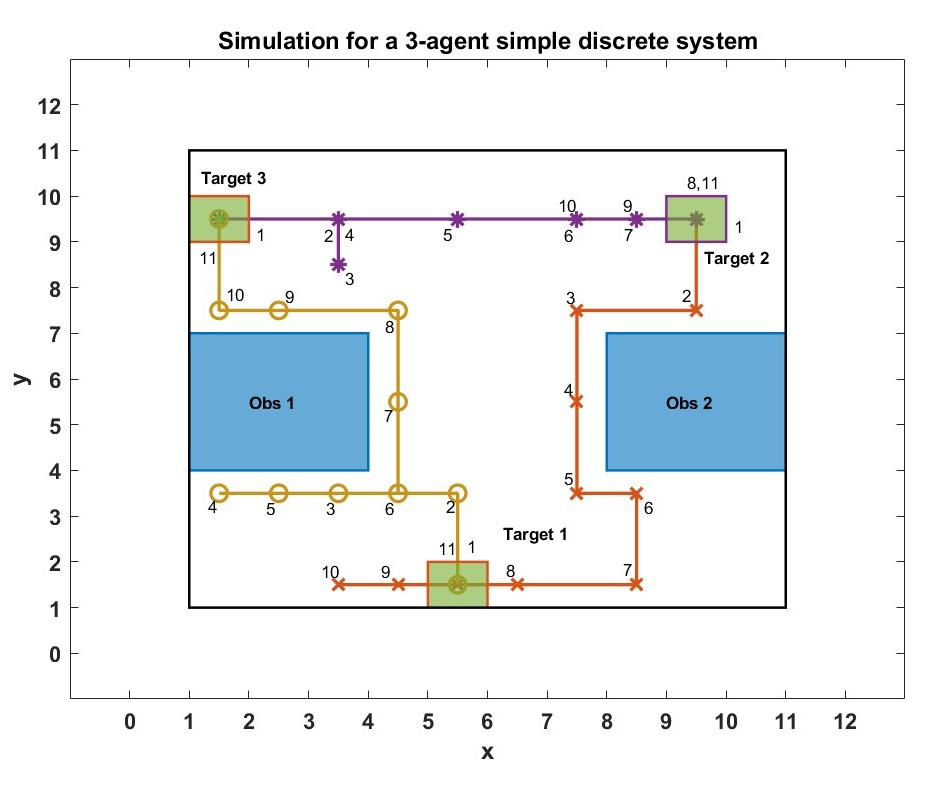
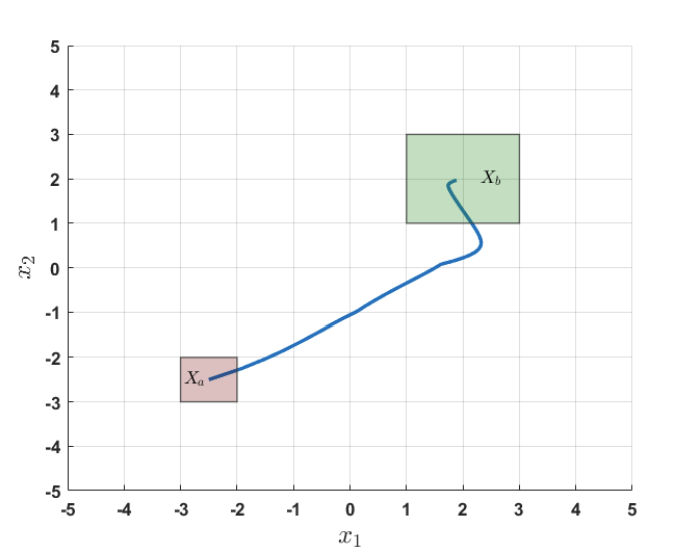
In this paper, we propose a computationally efficient symbolic controller synthesis technique for multi-agent systems. The paper focuses on synthesizing distributed controllers enforcing local temporal logic specifications along with global safety specifications for multi-agent systems. To solve the problem in a computationally efficient way we leverage the concept of control barrier functions. In particular, we use a three-step bottom-up approach: first, the symbolic controllers for individual agents are synthesized to enforce local temporal logic specifications, then we use a notion of control barrier functions for symbolic models to compose controlled agent systems by removing unsafe transitions, and finally, we synthesize controller for the reduced composed system to ensure the satisfaction of local temporal logic specifications while ensuring global safety specification. The effectiveness of our approach is demonstrated on a multi-robot system by comparing it with the conventional monolithic symbolic control approach